꿀벌이 길을 찾는 방식 그대로, 손바닥만 한 드론이 600m 밖에서 집을 찾아왔습니다

꽃가루를 뒤집어쓴 채 토끼풀꽃에서 꿀을 모으는 서양꿀벌(Apis mellifera). 이 작은 곤충이 수 킬로미터 밖에서도 정확히 둥지를 찾아오는 비결이 최신 자율 드론 설계에 그대로 옮겨졌습니다. 출처: Wikimedia Commons (Public Domain) / USFWS Mountain-Prairie
가로세로 한 뼘 남짓한 작은 쿼드콥터 한 대가 있습니다. 무게는 50g 정도, 두뇌라고 부를 만한 건 신용카드 크기의 라즈베리파이 4 컴퓨터 한 장이 전부죠. 이 손바닥 드론이 2026년 봄, 네덜란드의 풀밭에서 출발해 약 600m를 날아갔다가, 바람과 햇빛 반사를 헤치고 다시 출발점에서 50cm 안쪽으로 정확하게 돌아왔습니다.
그런데 더 놀라운 건 이 드론에 들어 있는 길찾기용 신경망의 용량입니다. 단 3.4킬로바이트. 보통 자율주행차나 매핑 로봇이 쓰는 것보다 수천 배 작은, 거의 글자 몇 줄짜리 데이터입니다. 이 작은 두뇌로 어떻게 그 먼 거리를 헤매지 않고 돌아왔을까요.
비밀은 드론이 아니라 꿀벌에게 있었습니다.
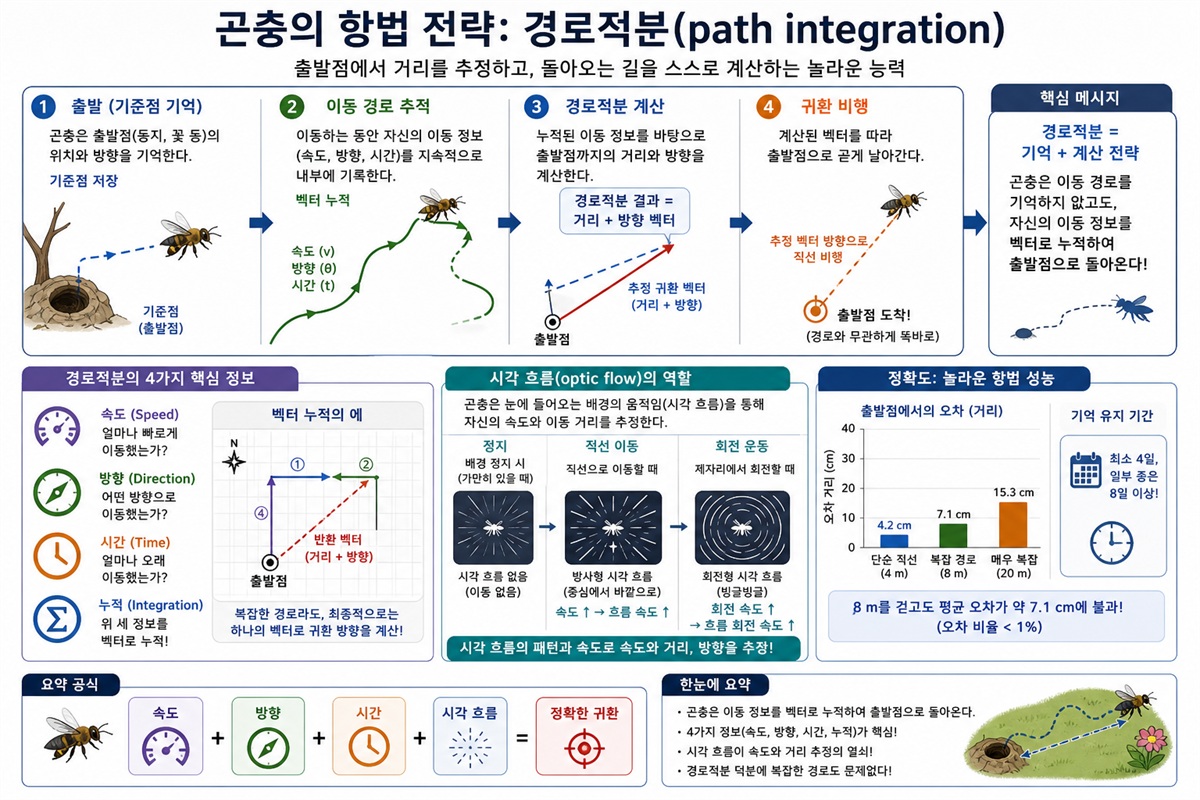
그림: 꿀벌이 둥지를 떠날 때 수행하는 학습비행과 경로적분(path integration) 도식. 둥지 주변을 짧게 맴돌며 풍경을 외운 뒤, 멀리 날아가도 이동 방향과 속도를 더해 집까지의 벡터를 머릿속에 유지합니다. ⓒ The Finch
꿀벌은 둥지에서 처음 나올 때 곧장 멀리 날아가지 않습니다. 둥지 주변을 짧게 맴돌며 주변 풍경을 머릿속에 새겨 넣죠. 곤충학자들은 이 행동을 학습비행이라고 부릅니다. 그렇게 풍경 사진첩을 한 번 찍어 두고 나면, 그 뒤 수 킬로미터를 날아가도 둥지로 정확히 돌아올 수 있게 됩니다.
돌아오는 길에는 두 가지 도구를 씁니다. 하나는 이동 방향과 속도를 머릿속에서 계속 더해 가는 경로적분이라는 계산이죠. 다른 하나는 시야에 흘러가는 풍경의 흐름, 즉 광학 흐름을 읽어 거리를 가늠하는 능력입니다. 1996년부터 호주 국립대학교의 곤충 신경과학자 만디암 스리니바산(Mandyam V. Srinivasan) 박사 연구팀은 꿀벌이 사실상 시각으로 거리를 재는 일종의 살아 있는 주행기록계를 갖고 있다는 사실을 잇따라 증명해 왔는데요. 2000년 학술지 《사이언스》에 발표된 그의 논문은 꿀벌이 거리 자체를 시간이나 에너지가 아니라 눈에 흘러간 풍경의 양으로 측정한다는 사실을 결정적으로 보여줬습니다.
문제는 경로적분에 작은 오차가 자꾸 쌓인다는 거죠. 바람에 휩쓸리거나 속도 측정이 한 번 어긋나면, 그 오차가 수백 미터 동안 누적돼 결국 엉뚱한 곳에 도착하게 됩니다. 그래서 꿀벌은 둥지 근처에 다다르면 미리 외워 둔 풍경 사진을 꺼내 보며 마지막 좌표를 다시 보정합니다. 처음의 그 짧은 학습비행이 바로 이 보정용 데이터를 모으는 작업이었던 거예요.
네덜란드 델프트 공과대학교의 인공지능·로봇공학자 휘도 더 크론(Guido C. H. E. de Croon) 교수 연구팀은 바로 이 꿀벌의 두 단계 전략을 그대로 드론에 옮겨 심었습니다. 연구팀은 이 항법 시스템에 비-내브(Bee-Nav)라는 이름을 붙였고, 2026년 5월 13일 《네이처》에 논문을 발표했죠. 제1저자인 우 더콴(Dequan Ou) 박사를 비롯한 8명의 공동 연구진이 함께 만들어 낸 결과물입니다.
방식은 단순합니다. 드론은 출발 지점에서 먼저 꿀벌처럼 짧은 학습비행을 합니다. 360도 전방향 카메라로 주변 풍경을 찍어가면서, 작은 신경망에게 이 풍경 사진을 보면 출발점이 어느 방향에 있는지 가르치죠. 이때 신경망 안에 만들어지는 가상의 화살표들을 연구팀은 호밍 벡터라고 불렀습니다. 학습이 끝나면 출발점 주변에는 학습 귀환 영역이라는 일종의 안전지대가 만들어지고요.
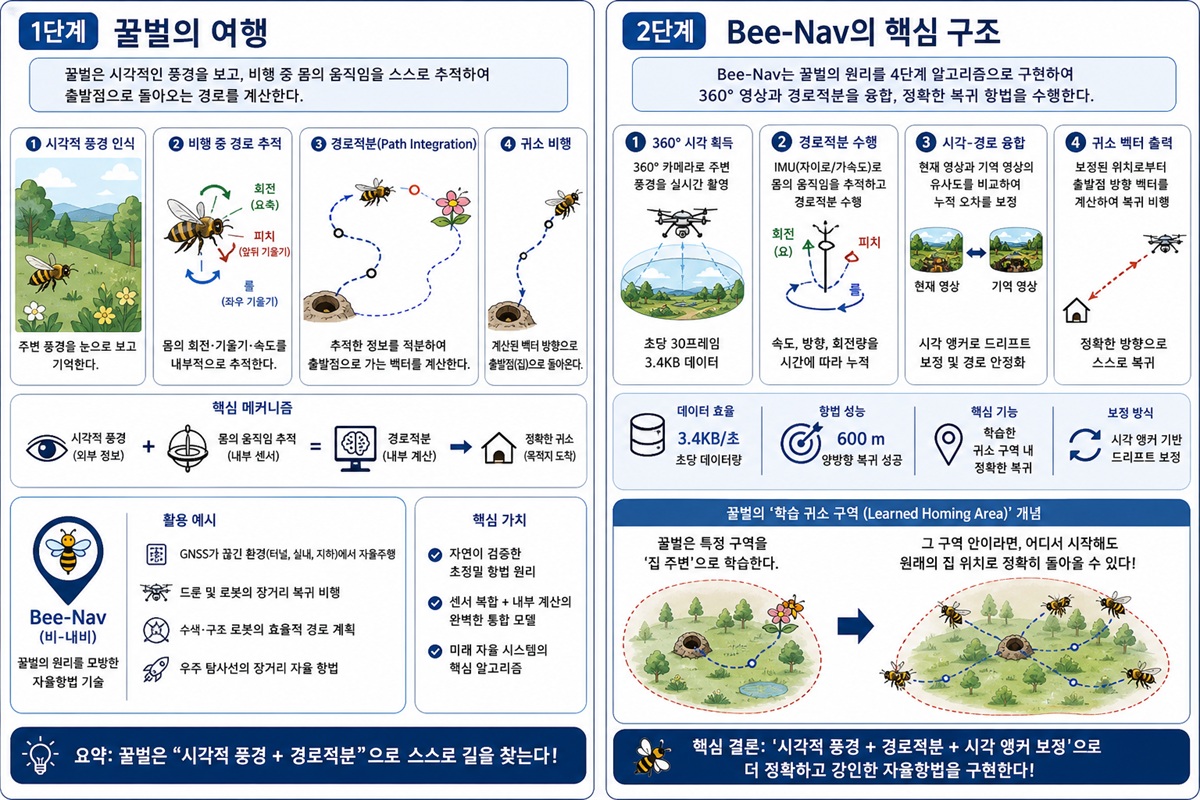
그림: 꿀벌의 항법 전략과 비-내브 드론 알고리즘 비교 도식. 양쪽 모두 출발 직후 짧은 학습비행으로 풍경을 외우고, 본 비행에서는 경로적분으로 큰 방향을 잡은 다음 시각 신경망으로 마지막 좌표를 보정합니다. ⓒ The Finch
본격 비행에 나선 드론은 먼저 꿀벌처럼 경로적분으로 거꾸로 되짚어 출발점 근처까지 돌아옵니다. 그러다 안전지대 안에 들어서면, 학습비행 때 익혀 둔 시각 신경망이 깨어나서 마지막 한 토막을 맞춰 줍니다. 누적된 오차를 시각 정보로 닦아내는 거죠. 흥미로운 점은, 연구팀의 시뮬레이션 결과 이 신경망이 비행 가능 영역 전체의 0.25~10% 정도만 학습해도 충분했다는 사실입니다. 즉 학습비행이 짧아도 된다는 얘기예요.
실험 결과는 한층 더 인상적이었습니다. 실내외에서 30~110m를 날린 비행 30회는 100% 성공했고, 200~600m짜리 장거리 비행 역시 70%의 비율로 출발점 50cm 안쪽으로 복귀했습니다. 바람이 부는 야외에서, 카메라가 햇빛에 잠시 눈이 머는 상황까지 포함된 결과죠. 이때 드론에 들어간 신경망 크기는 3.4킬로바이트와 42킬로바이트, 둘 중 하나였습니다. 한 장의 사진보다도 훨씬 작은 두뇌인 셈입니다.

4cm 폭, 2.4g 무게의 마이크로 쿼드콥터. 비-내브가 노리는 무게대는 30~50g 수준이지만, 이 손가락 위 드론은 자율 항법이 결국 어디까지 작아질 수 있는지를 단적으로 보여줍니다. 출처: Wikimedia Commons (CC BY 2.0) / j bizzie
이 결과가 왜 중요할까요. 지금까지 자율 드론이 작아질 수 없었던 가장 큰 이유는 길찾기에 드는 계산량이었습니다. 일반적인 매핑 알고리즘인 SLAM은 카메라로 본 풍경을 실시간으로 3차원 지도로 만들어 둡니다. 정확한 만큼 무겁고, 전력을 많이 쓰고, 큰 컴퓨터가 필요하죠. 그래서 자율 드론은 그동안 어른 손 두 개를 합친 크기 아래로 내려오기 어려웠습니다.
비-내브가 이 천장을 깬 거예요. 미국 카네기멜런 대학교의 기계공학자 사라 베르크브라이터(Sarah Bergbreiter) 박사는 이 정도로 작은 계산량이라면 진짜 야외에 자율 드론을 풀어 놓는 일이 비로소 현실적인 선택지가 됐다고 평가했죠. 미국 콜로라도 대학교 볼더 캠퍼스의 션 험버트 박사는 다만 복잡하거나 변화하는 환경에서는 추가로 장애물 회피 알고리즘이 필요할 거라고 짚었습니다.
더 크론 교수도 한계는 솔직하게 인정합니다. 아직은 출발점 한 곳을 기억해 돌아오는 수준이라, 여러 장소를 오가는 임무에는 추가 연구가 필요하다고 말했죠. 풍경 자체가 거의 없는 사막이나 바다 위 같은 환경, 그리고 진짜 꿀벌 크기까지 줄어들 때 따라오는 배터리 소형화 문제도 남아 있고요. 그래도 그는 이 알고리즘이 30g짜리 드론에도 무리 없이 올라갈 수 있다고 단언했습니다.
한 가지 묘한 점이 있습니다. 인간의 GPS와 위성 시스템, 거대한 데이터센터로 가득한 시대에, 결국 손바닥 드론을 집으로 데려온 건 1억 년 가까이 꽃밭을 오간 꿀벌의 오래된 비행 습관이었다는 사실이죠. 머릿속 풍경 사진 한 묶음과 머리 안의 작은 계산기 하나. 어쩌면 가장 똑똑한 항법이란, 가장 많이 보는 게 아니라 꼭 봐야 할 것만 보는 일인지도 모르겠습니다.
참고문헌
1. Ou, D., Hagenaars, J. J., Jankowski, M. R., Firlefyn, M. V. M., De Wagter, C., Muijres, F. T., Degen, J., & de Croon, G. C. H. E. (2026). "Efficient robot navigation inspired by honeybee learning flights." Nature. DOI: 10.1038/s41586-026-10461-3
2. Srinivasan, M. V., Zhang, S., Altwein, M., & Tautz, J. (2000). "Honeybee navigation: nature and calibration of the 'odometer'." Science, 287(5454), 851-853. DOI: 10.1126/science.287.5454.851
댓글을 남기려면 로그인이 필요합니다.
댓글을 불러오는 중...